

运动控制系统研究所
- 分类:技术研究
- 发布时间:2019-11-25 00:00:00
- 访问量:0
概要:
详情
一、研究院简介
重庆智能机器人研究院控制系统研究所是依托华中科技大学、华中数控股份有限公司、重庆理工学等高校与企业,充分利用各家的研发及技术优势以及机器人关键零部件研发和产业化成果优势,合国内高档数控基础和应用技术研究于一体的工程技术研究开发基地。控制系统研究坚持以产品创新为核心,市场需求为导向,全面提高企业产业升级和生产效率为目标,助力突破机器人产品研究的重大技术瓶颈,打造工业机器人技术创新中心。
控制系统研究所积极推进《中国制造2025》(国家制造强国建设战略)、重庆市科技创新“十三五”规划、《重庆市智能制造实施方案(2019—2022年)》等方案与措施,深入机器人高性能控制系统、高性能伺服驱动器、示教器及相关通用产品的研究开发,并开展机器人控制系统、伺服系统等技术基础理论、关键和共性技术、应用方法与技术等方向的研究,在机器人控制系统、伺服系统等应用技术研究方面具有重要影响力,形成行业优势。
控制系统研究所坚持以人为本,汇聚了一批多年来从事机器人产品技术研发、控制工程、机械设计制造及其自动化等相关技术方面的高水平工业机器人研发团队,为机器人产品技术研究、新产品开发、测试提供技术支持。
二、机器人核心产品
1、高性能机器人控制系统
HPC-200是控制系统研究所为工业机器人研发的新一代控制系统,采用开放式、模块化的体系结构,基于高速工业现场总线EtherCAT,可广泛适配各种从站设备;内嵌先进的运动学与动力控制算法,具备高速高精的轨迹控制,高精的力学建模及参数辨识等特点,可应用于PUMA、Delta、Scara等主要机器人模型及非标机器人;支持丰富的二次开发接口,可方便与第三方设备通讯,成功打破国外企业的技术垄断。目前在机床上下料、搬运码垛、打磨、焊接、涂胶、喷涂多个行业广泛应用。

2、机器人伺服驱动器
控制系统研究所多年来致力于工业机器人专用伺服驱动系统方面的技术及产品研发,低成本EtherCAT从站解决方案及一拖多直流共母线方案,高速度环带宽响应方案,满足机器人快速启停,反复加减速等动作需求。
目前拥有两大新型驱动器产品系列,分别是HSS-LDE系列模块化伺服驱动装置和HSS-LDE-X6一体化伺服驱动器装置。
HSS-LDE系列模块化伺服驱动器是控制系统研究所研制的新一代高性能小功率交流伺服驱动器。该系列驱动器采用组合式直流共母线设计,适配所有EtherCAT总线控制器,拓扑结构多样,系统选型灵活,可根据需求灵活扩展轴数、功率。功率范围:50W-1.5KW,支持最高分辨率25bit绝对式编码器,在机器人领域具有独特的优点:1、重力补偿技术,可抑制机器人上使能或断使能时的“点头” 现象,2、轻载弱磁控制技术,电机转速可达6000r/min,3、低频振动抑制和低刚性高增益设定。除此之外,该系列驱动器以其优异的性能,可适用于数控机床、如精雕机、高光机、木工机等工业自动化行业。
HSS-LDE-X6系列一体化伺服驱动器是控制系统研究所研制的新一代高性能多轴合一交流伺服驱动器。该驱动器集成了多轴模块化驱动的电源和驱动功能,集成度高,体积小,成本低。功率范围:1.0kW-3.0KW(单轴)。编码器接口:绝对式,最高分辨率25bit。主要特点:高实时性低延迟,六轴PWM同步刷新输出;AD采样可实现16bit至18bit的高分辨率;单ESC芯片实现多从站控制,最多可达16轴。
|
HSS-LDE系列伺服驱动器 |
HSS-LDE-X6系列伺服驱动器 |


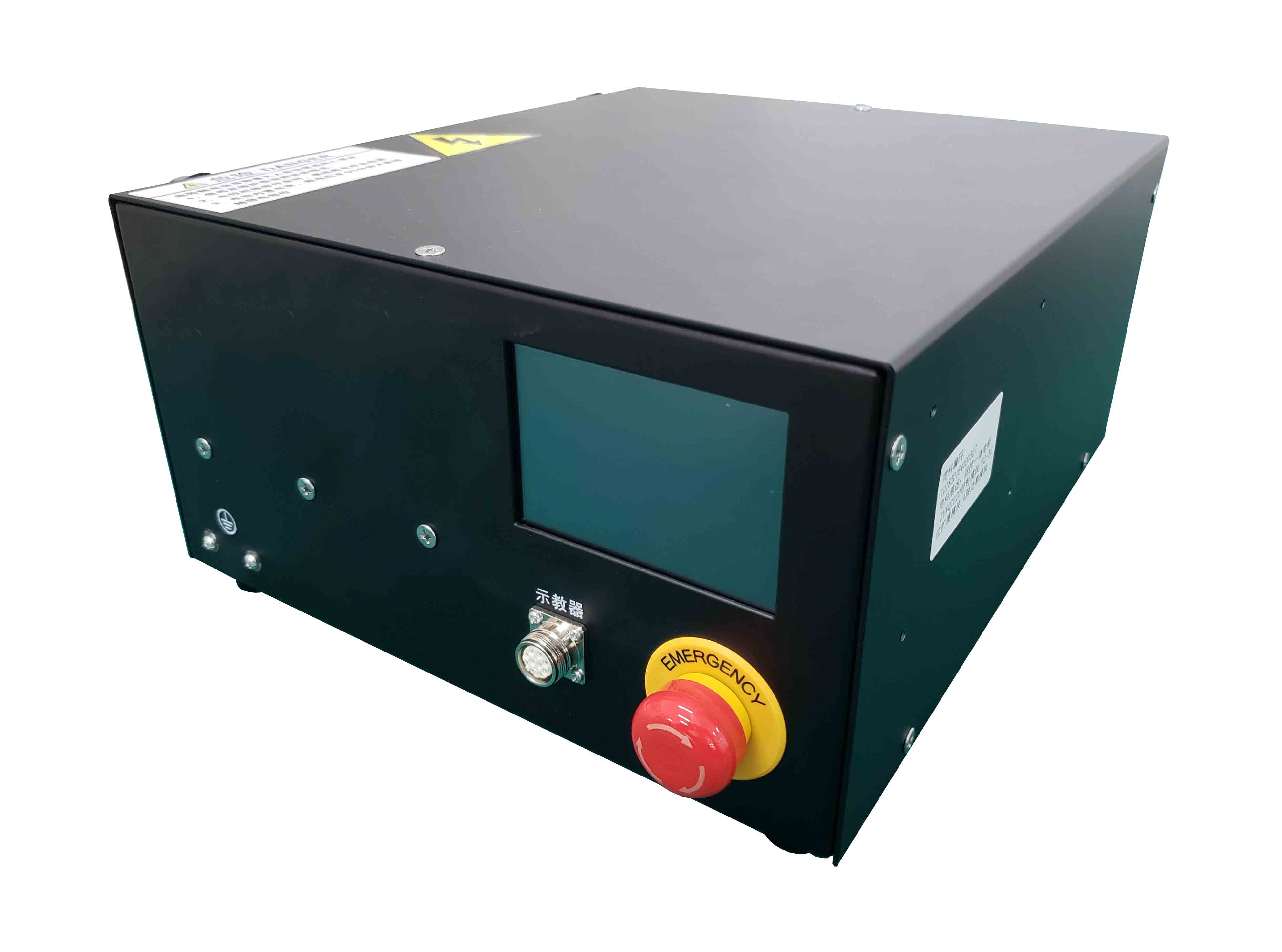
3、机器人驱控一体化系统
HSI-A系列驱控一体化机器人控制系统,采用行业领先SoC架构,并融合华数机器人迄今为止最先进的机器人控制技术和伺服驱动技术,重新打造的新一代轻量化、高性能的机器人控制系统,为3C打磨等行业提供可靠、准确、灵活、经济的机器人控制系统产品。改产品具有以下特点:
高集成度:机器人控制系统和电机控制集成在单芯片内完成,ARM(控制系统)和FPGA(电机控制)通过内部总线进行数据交互,比现场总线具有更高实时性。
高性能:高速、高精、高响应。
高性价比、小体积:机器人控制柜一体化设计,优化了控制柜布局布线,不仅节省了电器元器件,也减小了控制柜体积。
|
HSI-A系列驱控一体化系统 |
HSI-A系列驱控一体化系统 |

4、机器人示教装置
 |
|
HSPad-03系列示教器 |
该示教器有如下特点:
1、 EMC等级超过Ⅲ级,超强的抗干扰能力。
2、自动记录故障报警、操作历史以及网络状态。
3、支持USB进行程序备份、恢复与升。
4、可选码垛、打磨、喷涂和焊接等多种工艺应用包。
(2)、该款满足协作机器人需求的示教装置,采用9.7英寸,1536*2048高清分辨率屏幕。具有结构坚固,操作方便的特点。支持协作机器人所需要的图形化编程、拖动示教的快速编程方法,三维仿真技术,应对各种柔性化作业。
 |
|
智能协作机器人示教装置 |
该款智能协作机器人示教装置有如下特点:
1、 便捷的编程方式
图形化编程、拖动示教的快速编程方法,三维仿真技术,应对各种柔性化作业。
2、高性能低功耗
主板使用的IMX8QM是一款六核ARM架构64位处理器,IMX8QM还具有DSP、双核GPU以及Cortex-M4,能够借助DSP指令、OpenCL并行计算带来更多的算力,同时M4还可以以更低的功耗运行。
3、稳健且可靠
通过了振动和EMI/EMC及高低温等环境测试。坚固耐用,其高性能非常适合要求苛刻的工业自动化场景。
4、强大的图形处理器
拥有高性能的双核 GC7000 GPU,支持丰富、复杂的图形界面,具有杰出的图形处理能力。支持协作机器人所需的机器视觉、边缘计算,三维仿真等需求。
三、机器人核心关键共性技术
1、智能化高性能机器人控制系统
控制器是工业机器人基础核心部件之首,关键是机器人动力学建模和控制、多通道实时控制、全闭环控制等。控制系统研究所将智能工业机器人控制系统研发作为工作的重点,依托新一代人工智能技术,开展机器人视觉、深度学习、大数据处理等相关研究,开设机器人控制器研究室,开展路径优化、智能控制与决策支持算法等智能装备控制技术及装置研发。重点攻克变负载情况下高性能伺服控制技术、工业机器人误差补偿修正技术、“实时插补”控制技术、多工业机器人网络化和集群协调控制技术。
控制系统研究所瞄准工业机器人领域先进技术,在突破机器人高速高精基础上,结合多模态感知、机器视觉、深度学习等新一代人工智能技术,研究具备自感知、自学习、自适应、自决策的智能机器人控制系统。实验室下设三个技术验证平台:工业机器人控制系统关键技术验证平台;工业机器人传感器应用创新验证平台;工业机器人智能算法验证平台。工业机器人控制系统关键技术平台,以传统运动学、动力学模型为对象,研究动力学精确辨识、抑振控制、前馈控制、轨迹规划技术,解决机器人高速高精问题。工业机器人传感器应用创新验证平台,搭建开放式控制系统,接入力、振动、视觉、声音等多种传感器设备,开展共融机器人研究。工业机器人智能算法验证平台,以AI技术为核心,开展智能机器人算法验证。
2、高性能机器人伺服控制技术
伺服系统是机器人核心部件之一,其性能的好坏直接影响机器人的响应和精度,控制系统研究所在多年的电机控制研究基础上,基于机器人的应用特点,研究高性能的工业机器人专用伺服驱动系统,进一步工业机器人速度和精度。主要研究方向有总线通讯同步动态补偿技术;单ESC多从站控制技术;FPGA多轴多轴并行控制技术;电流环运算延迟补偿技术;前馈技术;输入整形技术;陷波滤波器设计等等。研究以上单元共性技术,提高带宽和响应,实现机器人高速高精控制。
3、机器人驱控一体技术
研发实现机器人控制器和多轴一体化伺服驱动器联合控制功能的单芯片驱控系统,研究单芯片底层驱动的电机三环控制与机器人多轴控制的算法融合、多核数据交互、内存资源优化、多任务并行执行技术,是工业机器人驱控一体化控制器规模化生产应用的关键。硬件采用单芯片实现机器人控制器和多轴一体化伺服驱动器多芯片控制的功能,同时配套设计 IO、多网口、外接编码器等接口,具备完整的机器人电控柜功能;软件上在控制算法上将电机三环控制算法与机器人运动学、动力学算法相融合,多算法高效、并行执行,实现机器人运动插补,应用层功能。在单芯片底层驱动上,实现多核数据交互、共享内存,实现 Linux 和 RTOS 双系统运行,FPGA 多任务并行执行等。
扫二维码用手机看
联系方式
地址:重庆市北碚区中德(水土)产业园5号楼
电话:023-88026867
传真:023-12345678
邮编:4000000
邮箱:cqi@cqirobot.com
网址:http://www.cqirobot.com

扫一扫,关注我们公众号
联系方式
地址:重庆市北碚区中德(水土)产业园5号楼
电话:023-88026867
传真:023-12345678
邮编:4000000
邮箱:cqi@cqirobot.com
网址:http://www.cqirobot.com
扫描关注我们公众号
CopyRight © 重庆智能机器人研究院 渝ICP备19016196号-1 网站建设:中企动力重庆